
تعریف استپ موتور و سروو موتور
نوع دیگر الکتروموتور ها موتورهای استپر میباشند این موتورها توسط پارس های فرکانسی کنترل شده، و با هر پالس زاویه مشخصی را حرکت می نمایند. بنابراین زمانی که نیاز به ایجاد حرکت های دقیق می باشد از این نوع الکتروموتور ها و طبعاً درایو آن ها باید استفاده نمود. در واقع نیاز به کنترل دقیق موقعیت در صنعت سبب اختراع سروو موتور ها شده است. به طور کلی سروو موتور با بهره گیری از یک انکودر ، موقعیت دقیق شفت خود را به درایو اعلام می نماید. بنابراین علاوه بر این که مانند استپر موتور با دقت میتوان آن را حرکت داد بلکه قادر خواهیم بود نتیجه دستور رانیز دریافت کرده و از اجرای کامل دستور حرکتی مطمئن شد. همچنین باز خورد موقعیت می تواند درایو را در اصلاح خطای ایجاد شده در حرکت یاری نماید.
از آنجایی که هر علمی زمانی ارزشمند خواهد بود که با عمل همراه باشد، سیاست ما همواره آموزش های مبتنی بر پروژه های عملی می باشد برای دوره کنترل حرکت و درایو های صنعتی یک پروژه کامل برای شما اجرا خواهیم نمود این پروژه را کاملاً تحلیل نموده و نیازمندی های حرکتی آن را تحت نرم افزار تیا پورتال و PLC S7-1200 فراهم می نمایم. بدین وسیله شما با نحوه تحلیل و ایجاد یک پروژه کامل صنعتی آشنا شده روش های حل مسئله را فرا خواهید گرفت و کاربرد عملی کنترل حرکت را عملاً در صنعت مشاهده خواهید کرد.
عناوین این پکیج اموزشی:
فصل 1 : استپر موتور و نحوه عملکرد آن
معرفی استپر موتور و نحوه عملکرد آن به طور کامل.
فصل 2 : سیم بندی استپ موتور و نحوه اتصال به PLC
نحوه اتصال سیم های موتور به درایو و همچنین نحوه سیم کشی درایو به plc جهت راه اندازی استپر موتور.
فصل 3 آموزش سروو موتور: بلوک های Motion Control در TIA
بلوک های کنترل حرکت در TIA جهت تولید پالس های کنترلی استپر موتور و سروو موتور به کار می روند. در اینجا مروری اجمالی بر روی این بلوک ها و کاربرد آن ها خواهیم داشت و در فصل های بعدی آن ها را تشریح خواهیم نمود.
فصل 4 : بلوک MC POWER
این بلوک جهت روشن کردن توابع کنترل حرکتی و همچنین تعریف پارامترهای حرکت در پی ال سی به کار می رود.
فصل 5 : بلوک Home
جهت حرکت الکتروموتور به محلی که آن را Home یا مبدا می نامیم به کار می رود.
فصل 6 : بلوک MC Reset
این بلوک جهت بازنشانی توابع حرکتی به مقادیر اولیه کاربرد دارد.
فصل 7 : بلوک MC MoveAbsolute
با استفاده از این بلوک موتور را تا مقصد خاصی به طور مطلق حرکت می دهیم.
فصل 8 : بلوک MC MoveRelative
با استفاده از این بلوک موتور را از همین جایی که هست به نسبت تا مقصد خاصی هدایت می کنیم.
فصل 9 : بلوک MC MoveVelocity
این بلوک موتور مربوطه را با سرعت خاصی به حرکت وا می دارد.
فصل 10 آموزش سروو موتور: بلوک MC Halt
این بلوک حرکت موتور را متوقف می کند.
فصل 11 : بلوک MC Movejog
بلوک موتور را بهطور سردستی حرکت میدهد که برای کاربردهای تعمیرات و تنظیمات به کار می رود.
فصل 12 : بلوک MC Changedynamic
این بلوک جهت تغییر پارامترهای حرکتی در حین کار کاربرد دارد.
فصل 13 : بلوک MC WriteParam
با استفاده از این بلوک توابع را برنامه ریزی کرده و پارامترهای آن ها را می نویسیم.
فصل 14 : بلوک MC ReadParam
با این بلوک مقادیر پارامترها را از بلوک های حرکتی می خوانیم.
فصل 15 : بلوک MC CommandTable
اگر حرکت های متناوب و توقف های متوالی داریم می توانیم سکانس های حرکت را در یک جدول تنظیم کرده الکتروموتور طبق محتوای جدول حرکت کرده یا متوقف می شود.

فصل 16 : آموزش سروو موتور و نحوه عملکرد آن
سروو موتورها موتور هایی هستند که انجام حرکت و میزان حرکت خود را توسط یک انکودر کنترل اعلام می کند توابع کنترل سرو موتور همان توابع حرکتی آموزش داده شده است. در این فصل سروو موتورها و اصول آن را آموزش می دهیم.
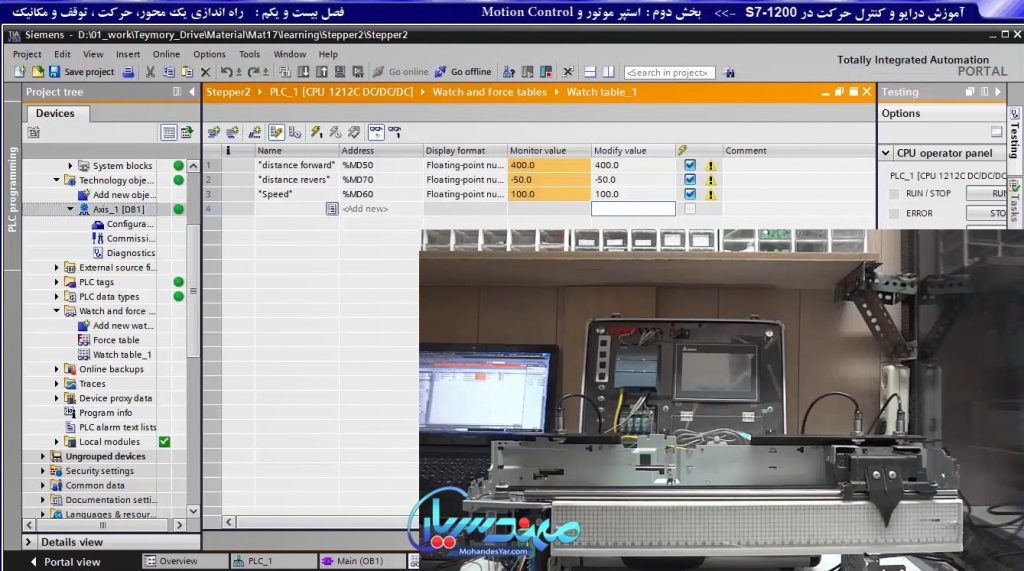
فصل 17 : لیمیت سوئیچ نرم افزاری
لیمیت سوئیچ ها جهت محدود کردن حرکت موتور به کار میروند در این فصل به طور نرم افزاری محدوده هایی را برای کنترل ایجاد می کنیم.
فصل 18 : لیمیت سوئیچ سخت افزاری
معمولاً محدود کردن حرکت الکتروموتور ها توسط میکرو سوئیچ های سخت افزاری در روی خود دستگاه انجام می شود که محل آن ها قابل تنظیم می باشد در این فصل آموزش خواهیم دید که چگونه این سوئیچ ها را دریافت کرده و در محدوده حرکت موتور اعمال نماییم.
فصل 19 : عملیات Homing
الکتروموتور با دریافت دستور Home به منطقه ای که برای آن به عنوان مبدا تعریف شده باز می گردد.

فصل 20 : پروژه جامع دستگاه اتوماتیک پر کننده نوشابه داخل لیوان
در این فصل یک پروژه کامل را تحلیل، تشریح، برنامه ریزی و اجرا خواهیم کرد. این پروژه یک دستگاه اتوماتیک است که وظیفه آن پر کردن نوشابه داخل لیوان است. شیوه کار به این صورت است که کاربر لیوان خالی را در قسمت مشخص قرار داده و در ادامه نازل دستگاه با شناسایی لیوان خالی به صورت خودکار حرکت کرده و در بالای آن قرار می گیرد. سپس نوشابه از نازل شروع به بیرون آمدن کرده و این کار تا پر شدن لیوان ادامه میابد. برای اجرای این پروژه از سخت افزار PLC 1200 زیمنس، استپر موتور و درایو مربوطه به همراه سنسورهای نوری کنتاکت دار استفاده شده است.

دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.